120 Machine Manual
SAMPLE IMAGE
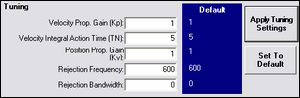
Velocity Prop. Gain (Kp) Entry Field
This entry field should specify the proportional gain of the velocity loop of the servo.
Velocity Integral Action Time (TN) Entry Field
This entry field should specify the integral action time of the velocity loop of the servo.
Position Prop. Gain (Kv) Entry Field
This entry field should specify the proportional gain of the position loop of the servo.
Rejection Frequency Entry Field
This entry field should specify the rejection frequency of the servo.
Rejection Bandwidth Entry Field
This entry field should specify the rejection bandwidth of the servo.
Default Column
This column displays the default values for all the tuning entry fields listed above.
Apply Tuning Settings Button
Pressing this button will apply the settings entered into the entry fields listed above.
Set To Default Button
Pressing this button will set all the tuning entry fields listed above to the values displayed in the Default Column.